JSR's automatización de procesos de manipulación robótica con YASKAWA O robot de manipulación aplícase na manipulación e desembalaxe de bolsas de partículas de plástico, é aoperación de manipulación precisa, fiable e sostible, aportando valor para promover a automatización da produción.
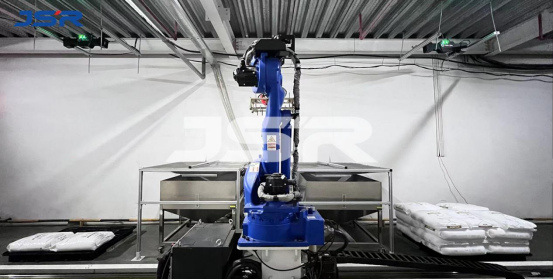
Non importa nos aspectos de maquinaria, agricultura, confección, construción ou vida diaria, podemos ver a figura das partículas de plástico reciclado. Despois do envasado, estas partículas deben ser manipuladas manualmente, o que é un traballo intermitente con alto custo e alta intensidade de traballo. O tempo de traballo anterior do cliente era de 8 horas, e cada bolsa de materiais era de 25 kg. A eficiencia manual é de 2 bolsas por minuto e pódense desmontar 960 bolsas nun día. O tempo de traballo despois da manipulación e desmontaxe do robot é de 24 horas, que se pode operar continuamente, e a eficiencia é de 3 bolsas por minuto e pódense desmontar 4320 bolsas nun día.
As solucións implementadas por Jieshspa para clientes: robot de manipulación Yaskawa GP180, carril terrestre de 7,5 m de lonxitude, colector de material, estante de material, carga máxima GP180 180 kg, alcance máximo do brazo 2702 mm. A viaxe efectiva da órbita terrestre de 7,5 m é de 6 m, a velocidade de movemento é de 0,7 m/s. Sistema de eliminación de identificación visual 3D. Sistema de eliminación de identificación visual 3D, cámara con función de aprendizaxe, a través da adquisición de datos de materiais precoz e posterior modelado de materiais, de xeito que a taxa de éxito do recoñecemento da cámara é do 99,9%.
A produción automática mellora moito a eficiencia do traballo, a capacidade de produción estable, a entrega precisa, a alta seguridade, o uso razoable da área existente, mellora a imaxe corporativa e a limpeza do taller, para lograr unha produción non tripulada.
Hora de publicación: 26-09-2022
